
Un manipulador robótico es un mecanismo parecido a un brazo robótico que está pensado para manipular o desplazar materiales, herramientas y partes sin la ayuda de un humano. La mayor parte de los manipuladores robóticos son dispositivos livianos que permiten a los humanos interactuar con objetos con total seguridad. En ocasiones, un material podría ser malo o radiactivo, o sencillamente puede estar situado en un espacio inaccesible. Estos mecanismos tienen aplicaciones industriales para hacer de manera eficaz labores como montaje, soldadura, y taladrado.
Los brazos segmentados tienen la posibilidad de coger y desplazar objetos bajo control humano. Cada manipulador robótico consta de dos recursos, el brazo manipulador y un controlador. La mayor parte de dichos brazos poseen 6 grados de independencia y un controlador patentado. Los brazos se diferencian entre sí en la manera en que los diferentes elementos permanecen dispuestos para dar un cierto tipo de rendimiento. El rendimiento del manipulador se mide por propiedades como su exactitud, peso de carga eficaz y rapidez.

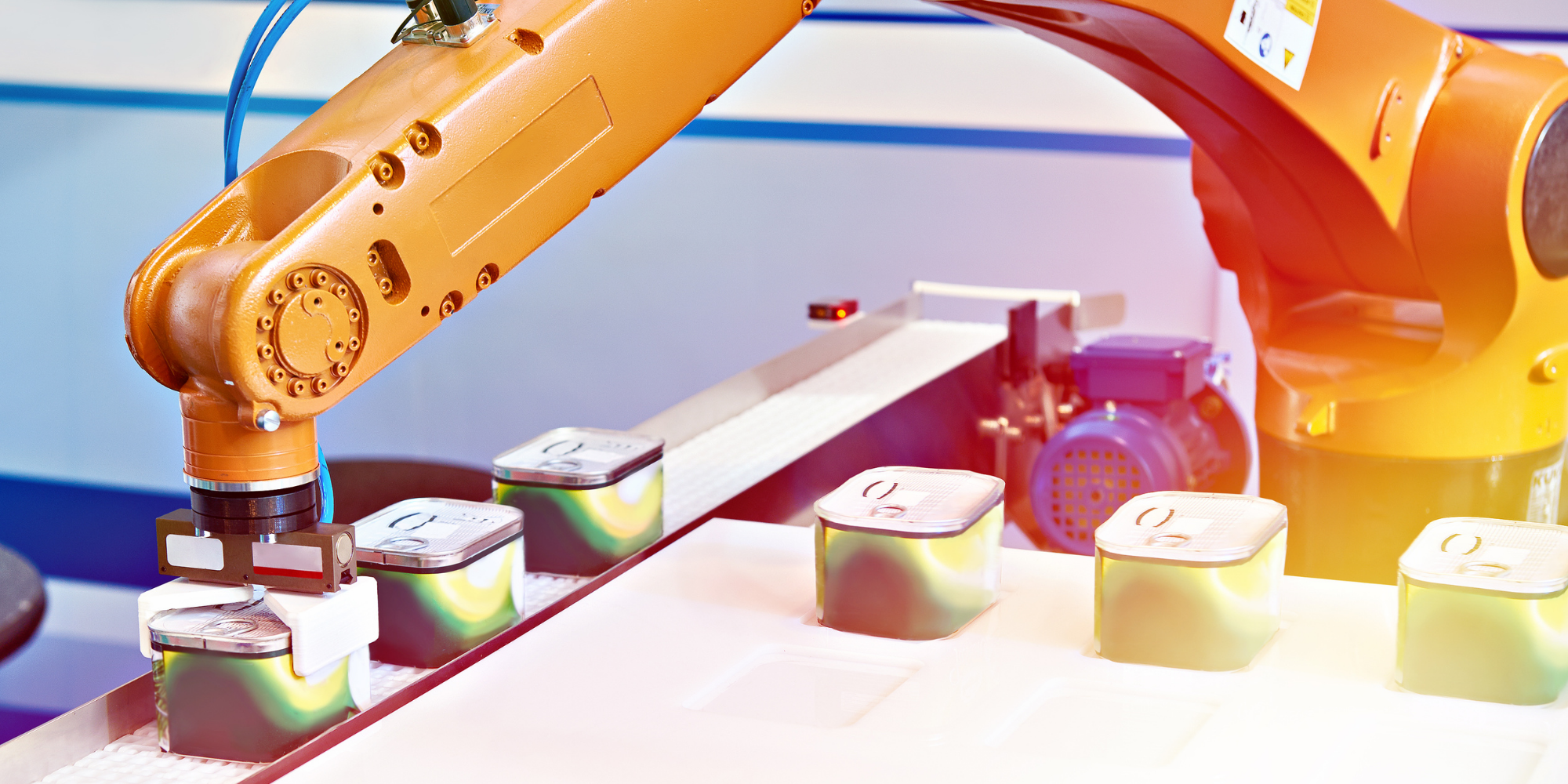
Las diferentes partes de un manipulador robótico
Algunas combinaciones de eslabones y articulaciones otorgan sitio a diversos tipos de manipuladores. Las piezas rígidas que conectan las articulaciones se denominan eslabones. Las articulaciones permiten que los enlaces se muevan y tienen la posibilidad de ser lineales o rotatorios. Las uniones mecánicas lineales solo permiten un desplazamiento no rotacional entre eslabones contiguos. No obstante, las juntas giratorias permiten que los eslabones de conexión giren.
El manipulador robótico de tipo cilíndrico se fabrica con juntas lineales, que permanecen conectadas a una junta rotativa de base. Un robot cartesiano, consta de uniones lineales en el brazo. Una configuración polar se apoya en una conjunción de juntas lineales y giratorias. Un manipulador robótico articulado, por otro lado, tiene un brazo cuyos enlaces permanecen conectados por medio de juntas rotativas.
Fundamentalmente, se puede pensar en el manipulador como una muñeca conectada a un brazo y un cuerpo humano. La muñeca tiene unas articulaciones compactas y se usa para orientar las partes. El brazo y el cuerpo humano se usan para manipular los instrumentos o partes dentro del espacio de trabajo. Este último se puede configurar de manera idónea para diversos tipos de aplicaciones.
Varios brazos manipuladores tienen la posibilidad de fijar a casi cualquier área. Ciertos manipuladores han avanzado hasta el punto en que las muñecas tienen dentro dedos mecánicos de agarre. Esto posibilita que el manipulador robótico coja un objeto tan delicado como un huevo.
